Tutoriales de desarrollo de Sistemas Operativos en Rust con la Raspberry Pi
![]()
![]()
![]()
![]()

ℹ️ Introducción
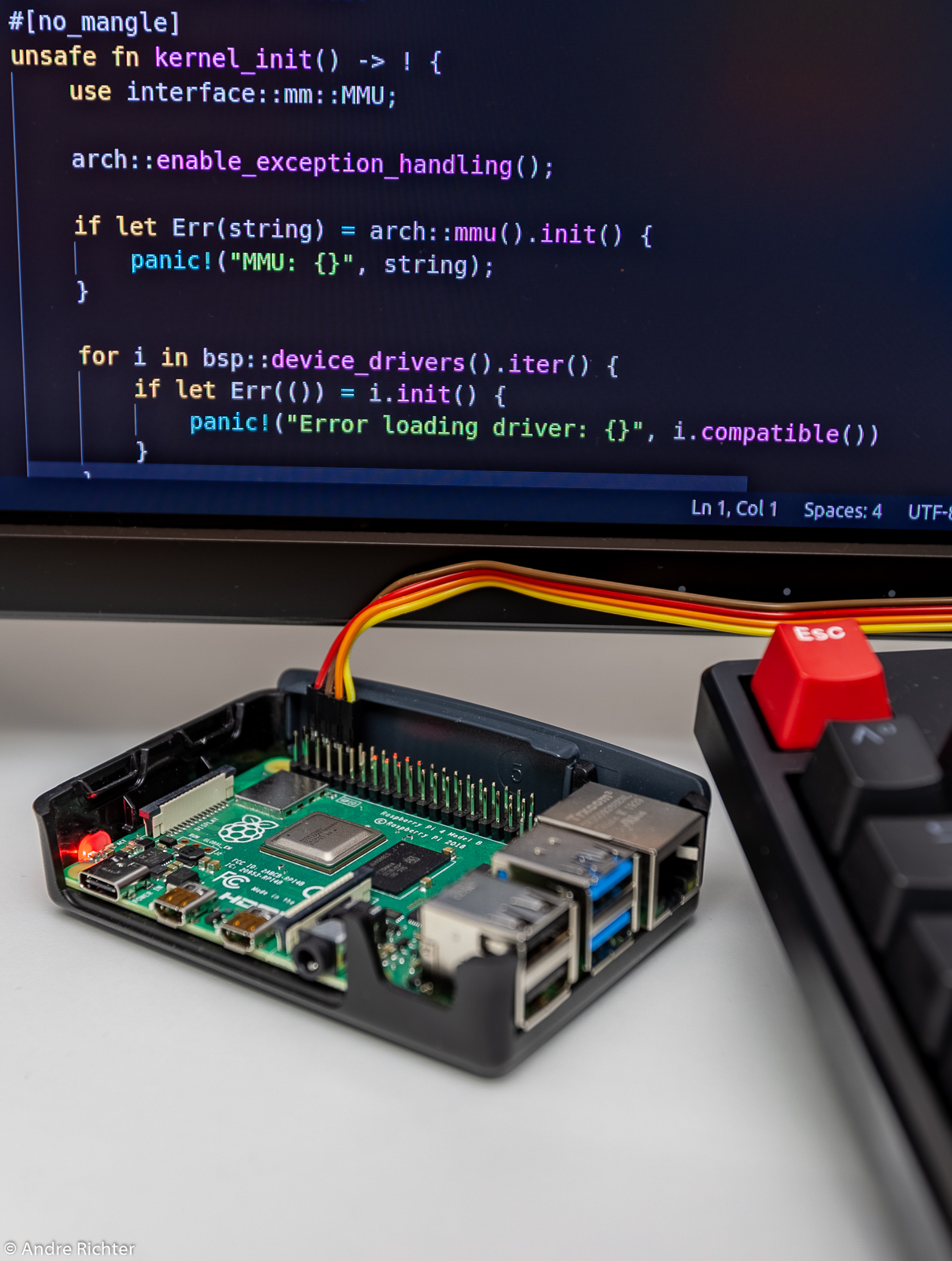
Esto es una serie de tutoriales para los desarrolladores aficionados a los Sistemas Operativos (OS) que se están adentrando a la nueva arquitectura ARM de 64 bits ARMv8-A architecture. Los tutoriales darán una guía paso a paso en cómo escribir un Sistema Operativo monolítico desde cero. Estos tutoriales cubren la implementación común de diferentes tareas de Sistemas Operativos, como escribir en una terminal serie, configurar la memoria virtual y manejar excepciones de hardware (HW). Todo mientras usamos la seguridad y velocidad que Rust nos proporciona.
¡Divértanse!
Atentamente,
Andre (@andre-richter)
P.S.: Para otros lenguajes, por favor busquen los diferentes archivos README. Por ejemplo, README.CN.md o README.ES.md. Muchas gracias a nuestros traductores 🙌.
📑 Estructura
- Cada tutorial contiene un solo binario arrancable correspondiente al núcleo.
- Cada tutorial nuevo extiende el tutorial anterior.
- Cada tutorial tendrá un
READMEy cadaREADMEtendrá un pequeña sección detl;dren donde se dará una pequeña perspectiva general de los cambios y se mostrará el código fuentediffdel tutorial anterior para que se puedan inspeccionar los cambios/adiciones que han ocurrido.- Algunos tutoriales además de tener un
tl;drtambién tendrán una sección en la que se dará una explicación con todo lujo de detalle. El plan a largo plazo es que cada tutorial tenga una buena explicación además deltl;dry eldiff; pero por el momento los únicos tutoriales que gozan de una son los tutoriales en los que creo que eltl;dry eldiffno son suficientes para comprender lo que está pasando.
- Algunos tutoriales además de tener un
- El código que se escribió en este tutorial soporta y corre en la Raspberry Pi 3 y en la Raspberry 4
- Del tutorial 1 hasta el 5 son tutoriales “preparatorios”, por lo que este código solo tendrá sentido ejecutarlo en
QEMU. - Cuando llegues al tutorial 5 podrás comenzar a cargar y a ejecutar el núcleo en una Raspeberry de verdad, y observar la salida serie (
UART).
- Del tutorial 1 hasta el 5 son tutoriales “preparatorios”, por lo que este código solo tendrá sentido ejecutarlo en
- Aunque la Raspberry Pi 3 y 4 son las principales placas este código está escrito en un estilo modular, lo que permite una fácil portabilidad a otras arquitecturas de CPU o/y placas.
- Me encantaría si alguien intentase adaptar este código en una arquitectura RISC-V.
- Para la edición recomiendo Visual Studio Code con Rust Analyzer.
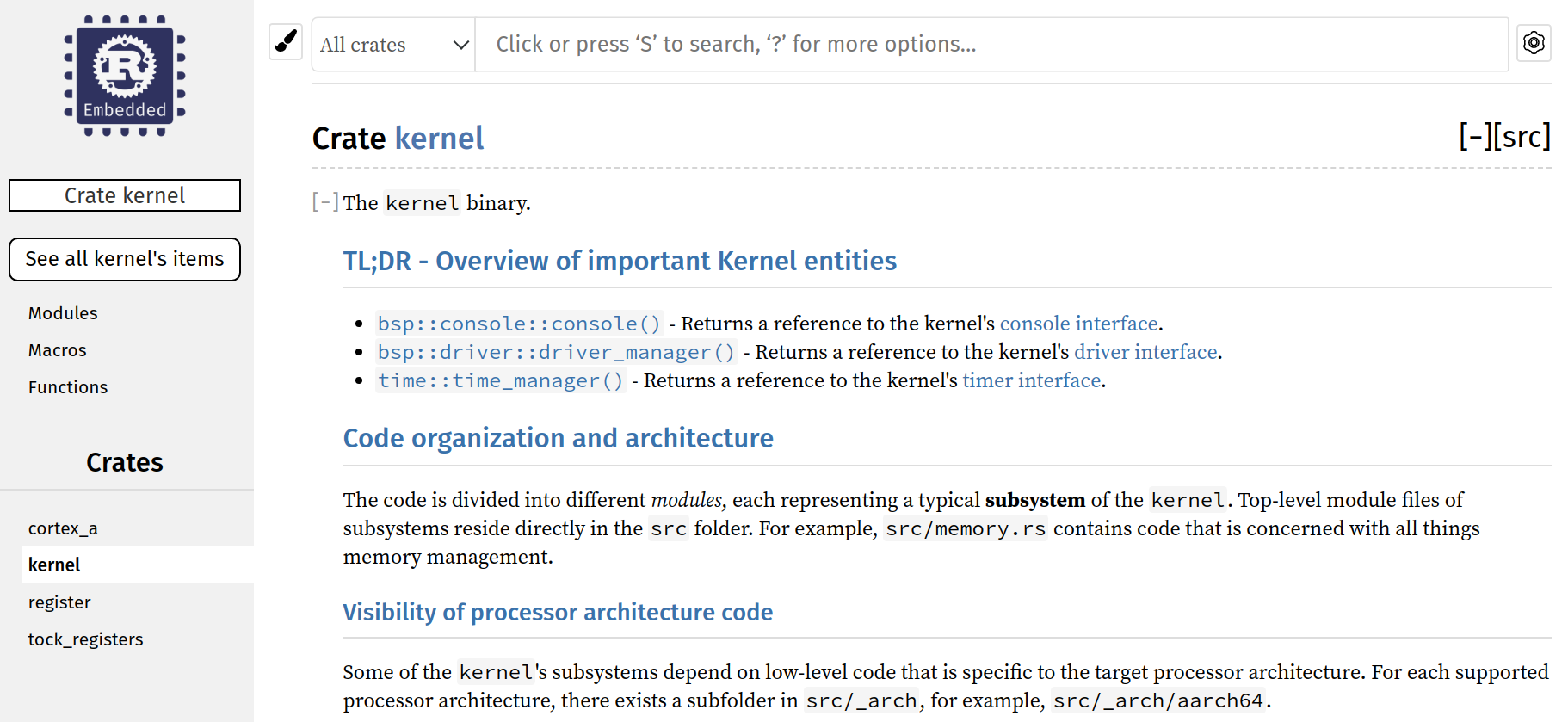
- En adición al texto que aparece en los tutoriales también sería recomendable revisar el comando
make docen cada tutorial. Este comando te deja navegar el código documentado de una manera cómoda.
Salida del comando make doc
🛠 Requisitos del sistema
Estos tutoriales están dirigidos principalmente a distribuciones de Linux. Muchas de las cosas vistas aquí también funcionan en macOS, pero esto solo es experimental.
🚀 La versión tl;dr
-
(Solo para Linux) Asegúrate de que la cuenta de tu usuario está en el grupo
docker. -
Prepara la
Rusttoolchain. La mayor parte se hará automáticamente durante el primer uso del archivo rust-toolchain.toml. Todo lo que nos queda hacer a nosotros es:i. Si ya tienes una versión de Rust instalada:
cargo install cargo-binutils rustfiltii. Si necesitas instalar Rust desde cero:
curl --proto '=https' --tlsv1.2 -sSf https://sh.rustup.rs | sh source $HOME/.cargo/env cargo install cargo-binutils rustfilt -
En caso de que uses
Visual Studio Code, recomiendo que instales la extensión Rust Analyzer extension. -
(Solo para macOS) Instala algunas
Rubygems.Ejecuta esto en la carpeta root del repositorio:
bundle install --path .vendor/bundle --without development
🧰 Más detalles: Eliminando Lios con Toolchains
Esta serie trata de enfocarse lo máximo posible en tener una experiencia agradable para el usuario. Por lo tanto, se han dirigido muchos esfuerzos a eliminar la parte más difícil del desarrollo de los sistemas incorporados (embedded) tanto como se pudo.
Rust por sí mismo ya ayuda mucho, porque tiene integrado el soporte para compilación cruzada. Todo lo que necesitamos para compilar desde una máquina con una arquitectura x86 a una Raspberry Pi con arquitectura AArch64 será automáticamente instalado por rustup. Sin embargo, además de usar el compilador de Rust, también usaremos algunas otras herramientas, entre las cuales están:
QEMUpara emular nuestro núcleo en nuestra máquina principal.- Una herramienta llamada
Minipushpara cargar el núcleo en una Raspberry Pi cuando queramos usandoUART. OpenOCDyGDBpara hacer depuración (“debugging”) en la máquina a instalar.
Hay muchas cosas que pueden salir mal mientras instalamos y/o compilamos las versiones correctas de cada herramienta en tu máquina. Por ejemplo, tu distribución de Linux tal vez podría no proporcionar las versiones más recientes de paquetes que se necesiten. O tal vez te falten algunas dependencias para la compilar estas herramientas.
Esta es la razón por la cual usaremos Docker mientras sea posible. Te estamos proporcionando un contenedor que tiene todas las herramientas o dependencias preinstaladas. Si quieres saber más acerca de Docker y revisar el contenedor proporcionado, por favor revisa la carpeta docker del repositorio.
📟 Puerto Serie USB
Ya que el núcleo desarrollado en este tutorial se ejecuta en hardware real, se recomienda que tengas un adaptador de puerto serie USB cable para sentir la experiencia completa.
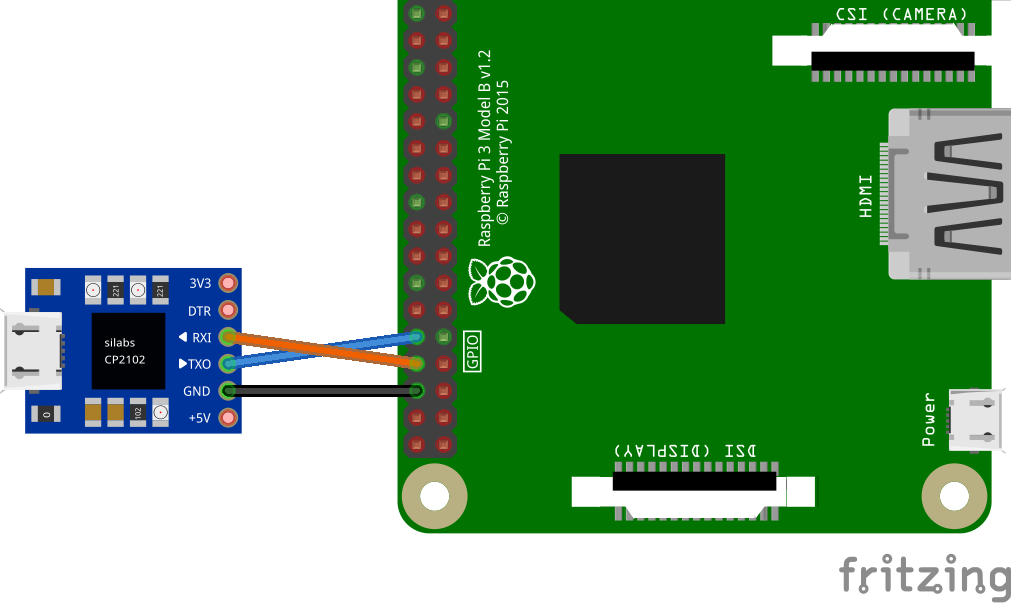
- Puedes encontrar estos cables que deberían funcionar sin ningún problema en [[1]] [[2]], pero hay muchos otros que pueden funcionar. Idealmente, tu cable estaría basado en el chip
CP2102. - Lo conectas a los pines
GNDyGPIO14/15como se muestra en la parte inferior. - Tutorial 5 es la primera vez en la que lo vas usar. Revisa las instrucciones sobre cómo preparar una tarjeta SD para arrancar en tu núcleo desde ahí.
- Empezando con el tutorial 6, arrancar núcleos en tu Raspberry Pi comienza a ser más fácil. En este tutorial se desarrolla un
chainloader, que será el último archivo que necesitarás copiar de manera manual a la tarjeta SD por el momento. Esto te permitirá cargar los núcleos de los tutoriales durante el arranque usandoUART.
[[1]]: https://www.amazon.de/dp/B0757FQ5CX/ref=cm_sw_r_tw_dp_U_x_ozGRDbVTJAG4Q [[2]]: https://www.adafruit.com/product/954
🙌 Agradecimientos
La versión original de estos tutoriales empezó como un fork de los increíbles tutoriales de programación en hardware en la RPi3 en C de Zoltan Baldaszti. ¡Gracias por darme un punto de partida!
Traducciones de este repositorio
- Chino:
- Español:
- @zanezhub.
- En el futuro habrán tutoriales traducidos al español.
Licencia
Este proyecto está licenciado por cualquiera de las siguientes licencias como alguna de tus dos opciones
- Apache License, Version 2.0, (LICENSE-APACHE o http://www.apache.org/licenses/LICENSE-2.0)
- MIT license (LICENSE-MIT o http://opensource.org/licenses/MIT)
Contribución
A menos de que lo menciones, cualquier contribución enviada por ti para su inclusión en este trabajo, tal como se define en la licencia Apache-2.0, deberá tener doble licencia como se muestra en la parte superior, sin ningún cambio de términos o condiciones.